
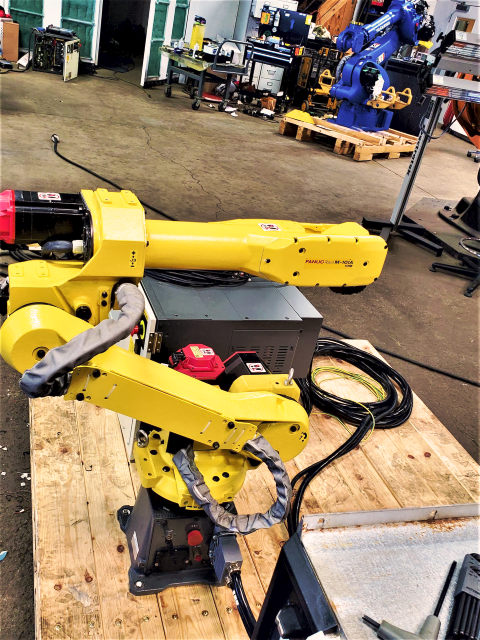
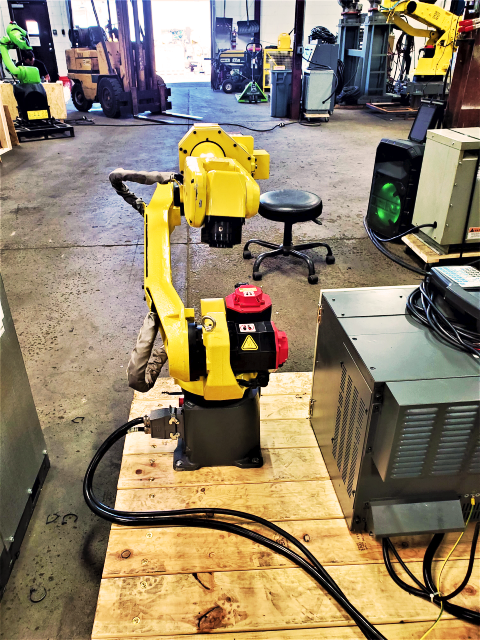


FANUC M10ia/10M Overview
The FANUC M-10ia/10M is a high inertia industrial robot designed for smaller robotic material handling applications. This robot manipulator has the same payload as the FANUC M-10ia, but features the high inertia capability that allows for a higher allowable load inertia at the wrist. This manufacturing robot arm is used in different applications including robotic assembly, automated material removal, and robotic part transfer. The M-10ia/10M is a six axis robot with servo driven motors. The FANUC M10ia/10M is available in the powerful FANUC R-30ib controller. The addition of an M10ia 10M articulated robot integrated with an end of arm tooling such as a suction gripper can quickly automate an application. The part number of the robotic manipulator is A05B-1221-B702. Purchasing a used FANUC robot such as the FANUC M10ia/10M is a economic way to automate.Applications that require a higher payload and reach should used the FANUC M-20ia/20M. Applications that do not require the reach and payload of this industrial robot arm could used a FANUC LR Mate 200id/7L. This handling robot is similar in reach and payload to the Yaskawa MH12, ABB IRB 1600, and the KUKA KR10 R1100.
Looking at selling a used FANUC robot like this? Click Here: Selling a used robot